The 3D Analysis Software
The image analysis software Mov3D offers you the possibility to analyze 3D motion of dynamic recordings.
For this you track objects in several different stereoscopic views with the module MovXact. Subsequently the 3D curves are calculated based on photogrammetric methods.
Leave the Plane: 3D is much more than 2D
Main features
- Easy management of multi views within one test file
- Interface to 3D control points
- New type of marker CODE (= coded ring marker, by AICON)
- Calculation of camera position using known control points
- Calibration of camera and lens with powerful distortion correction.
(Use drag&drop from module CamFolder) - 3D calibration and output of x-y-z displacement/time diagrams
(with a-v differentiation etc. see MovXact)
Data necessary for successful 3D analysis:
| control point data |  |
| Tracking data: control points and unknown points | |
| image sequence (per view) |
|
| Calibration measurements | |
| image sequence of test target + camera - lens - data (per camera)+ control point data in ASCII file |
 |
| ► Position measurements | |
|
3D control points with tracking data + |
 |
| ► 3D measurements | |
| tracking data of unknown points + calibration measurements + position measurements ( n * 2D → 3D |
 |
Pre-conditions for 3D measurements
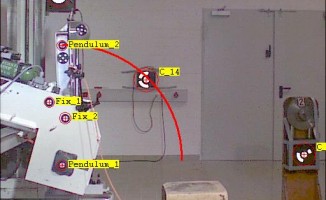
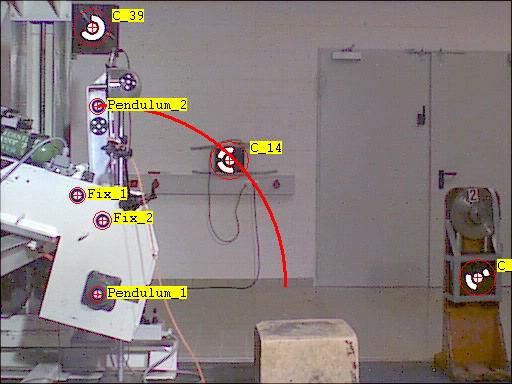
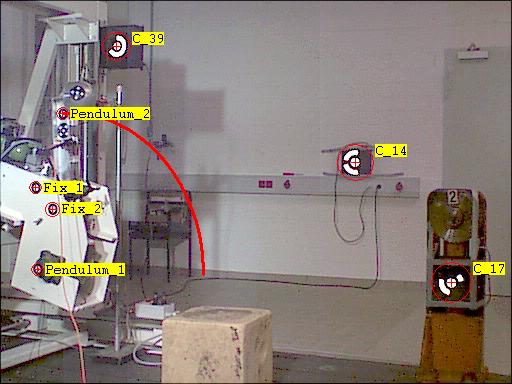
- At least two views from different points are included in the analysis session.
- (Same) control points and marker targets with the same name are setup and measured in the single views.
- All cameras run synchronously (as possible within 1 line)
- The frequencies of the image sequences need to be equal or
integer parts of the maximum occurring frequency = max. frequency / n. - The T0 start times should be in the raster of the maximum image frequency:
T0(n) - T0-min. = 1 / max. frequency. - The camera positions are calculated within the overlapping time interval; for this measurement data of at least 4 control points per image are necessary. Alternatively the positions may be defined as „static“.
- A triangulation on the basis of the measured image coordinates must be possible.
- Own scales or rulers are not necessary for calibration.
The scaling is implicitly included in the control point information.
| 型號 | 概述 | 詢價數量 |
|---|